The Case for a Higher-Dimensional Universe
The central hypothesis of this work is that the dark sector does not consist of unseen substances, but instead reflects the portion of gravitational curvature that originates in a higher‑dimensional bulk and only partially projects into our (3+1)-dimensional spacetime. If gravity propagates through Dg spatial dimensions while we directly experience only three, then the overwhelming majority of curvature generated by the full geometry necessarily resides outside the observable manifold. Only the component of curvature that projects into the three spatial dimensions we inhabit appears as ordinary matter and energy.
Observationally, only about five percent of the universe’s total gravitational influence behaves as baryonic matter. In the dimensional‑projection framework, this fraction is not treated as a compositional mystery but as a geometric clue: it is the proportion of total curvature that can be fully represented within a three‑dimensional spatial slice. To formalize this, consider the gravitational bulk as a (Dg + 1)-dimensional Lorentzian manifold (M,gAB), and our universe as a (3+1)-dimensional submanifold (Σ,qμν) with induced metric
where eAμ are tangent vectors to Σ. The projection operator
has rank three in the spatial sector and therefore selects only three of the Dg spatial directions of the bulk.
Assume that, at cosmological scales, the bulk curvature is statistically isotropic across its spatial dimensions. Let K denote the curvature density per spatial direction. The total spatial curvature budget of the bulk then scales as
while the curvature accessible to observers confined to Σ is
The visible curvature fraction is therefore fixed by the ratio of dimensionalities:
This result can also be expressed tensorially. If the spatial curvature operator is isotropic,
then the curvature trace in the bulk is
while the curvature trace accessible on Σ is
The ratio of these traces again yields
showing that the visible curvature fraction is determined by the rank‑3 versus rank‑ Dg structure of the projection operator.
Identifying the visible curvature fraction with the observed baryonic fraction,
gives the dimensional constraint
Thus the inference D ≈ 60 is not a numerological coincidence but the unique dimensionality that makes the geometrically determined projection fraction match the empirically measured visible gravitational fraction. The universe’s curvature budget thereby encodes its own dimensional architecture.
This interpretation stands in contrast to existing higher‑dimensional theories. In string theory, dimensionality is fixed by mathematical consistency; in braneworld models, extra dimensions are introduced to modify gravity at specific scales; and in Kaluza–Klein theory, additional dimensions are compactified to unobservable sizes. In all such approaches, dimensionality is a theoretical input. In the dimensional‑projection framework, by contrast, the number of gravity‑active spatial dimensions is treated as an observable quantity constrained directly by cosmological data. Rather than postulating extra dimensions for unification or elegance, the framework infers them from the measured ratio between visible and dark gravitational influence.
The implications are significant. If the dark sector reflects higher‑dimensional curvature rather than unseen forms of matter or energy, then the universe is embedded in a far richer geometric structure than the four‑dimensional picture suggests. The effective Einstein equations on Σ necessarily contain additional terms arising from how bulk curvature projects onto the observable slice. These terms resemble the projected Weyl tensor Eμν familiar from braneworld models, but here they acquire a different interpretation: they represent the portion of bulk curvature that does not fully project into three spatial dimensions. Under this view, phenomena currently attributed to dark matter and dark energy emerge naturally as the four‑dimensional imprint of curvature residing in the higher‑dimensional gravitational bulk.
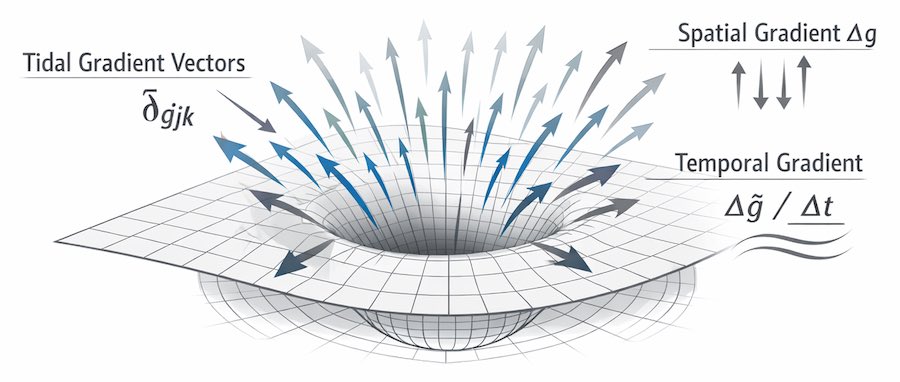
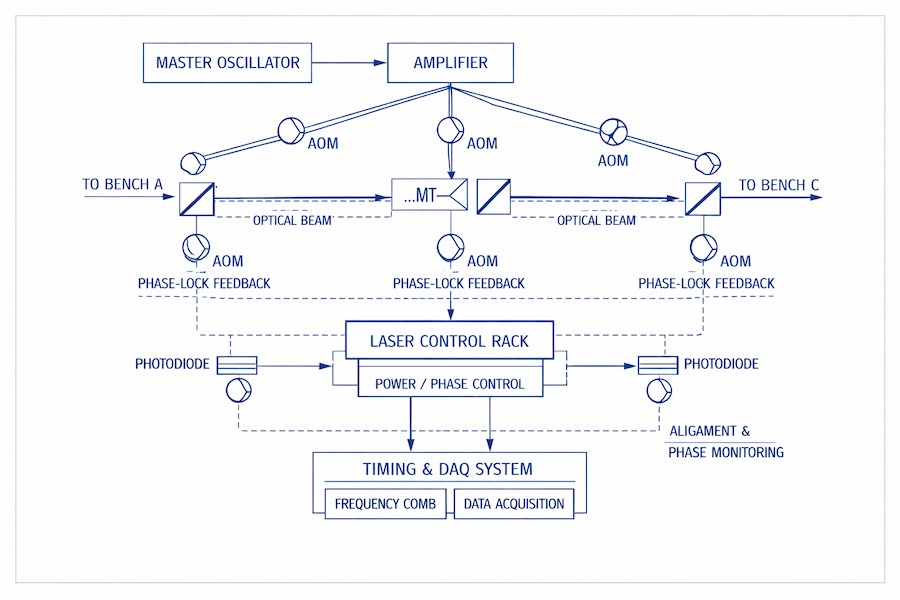
A major obstacle in evaluating this hypothesis is that no existing instrument can measure the kind of gravitational information required to detect higher‑dimensional curvature. Current interferometers measure integrated strain along one‑dimensional baselines, making them exquisitely sensitive to path‑averaged distortions but blind to the spatial derivatives of the metric. They measure global distortions, not the local tidal gradients that would reveal geometric structure beyond four dimensions.
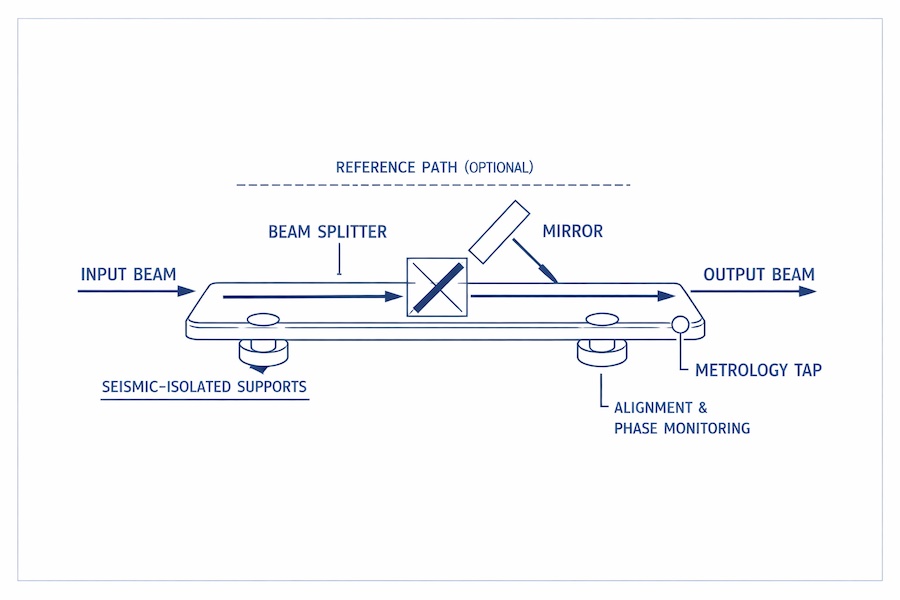
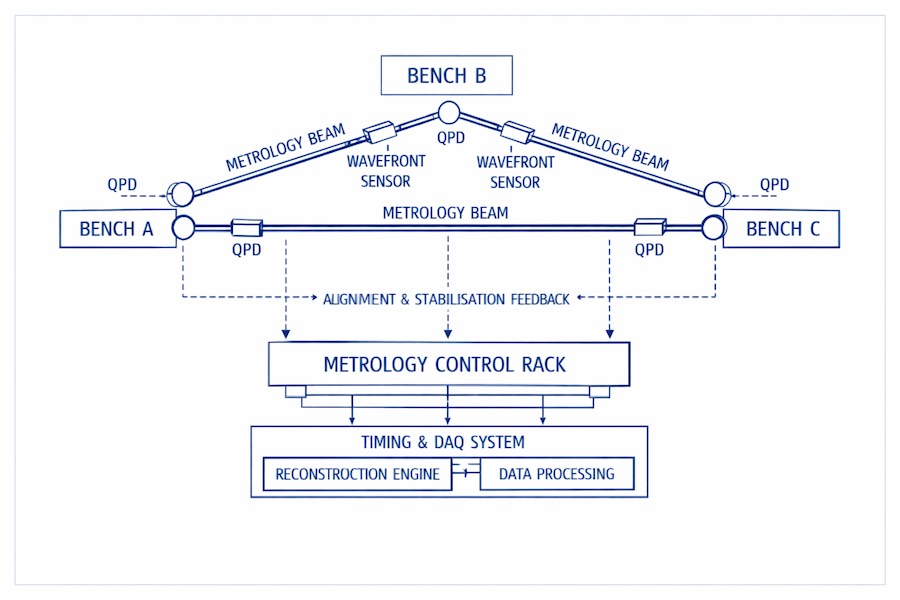
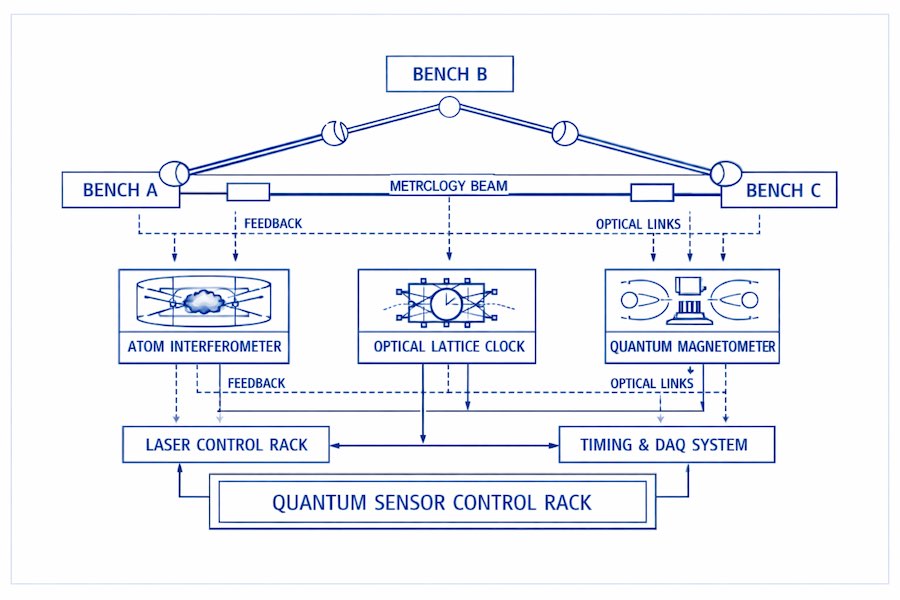
Testing the hypothesis therefore requires an instrument capable of mapping the spatial derivatives of the metric—the local tidal‑gradient field within a finite three‑dimensional region. This is the motivation for metric‑gradient interferometry, developed later in the work. Such an instrument would directly sample the tidal‑gradient tensor, reconstructing the curvature texture of spacetime rather than its path‑averaged strain. These gradients encode the small‑scale anisotropies, directional dependencies, and cross‑component correlations that higher‑dimensional models predict.
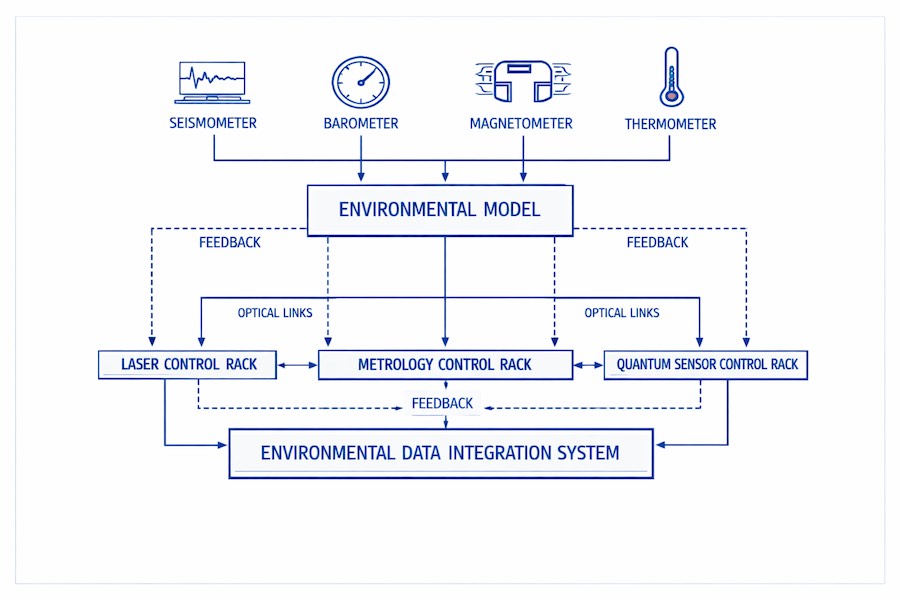
Even with such measurements, the resulting data would be extraordinarily high‑dimensional. Detecting higher‑dimensional curvature therefore requires not only a new form of measurement, but also a new form of analysis—one capable of recognising geometric patterns that do not exist in ordinary four‑dimensional intuition. Artificial intelligence plays a crucial role here: AI systems can naturally encode and manipulate high‑dimensional manifolds, allowing them to infer the structure of the higher‑dimensional bulk from its projection onto the four‑dimensional brane.
In this sense, AI becomes a scientific interface between human observers and the larger geometric structure of spacetime. The case for a higher‑dimensional universe thus arises from the mismatch between the observed matter content of the cosmos and the gravitational phenomena it produces. By interpreting the dark sector as a projection effect of higher‑dimensional curvature—and by developing both the measurement techniques and computational tools required to detect such curvature—it becomes possible to test this idea empirically rather than philosophically.
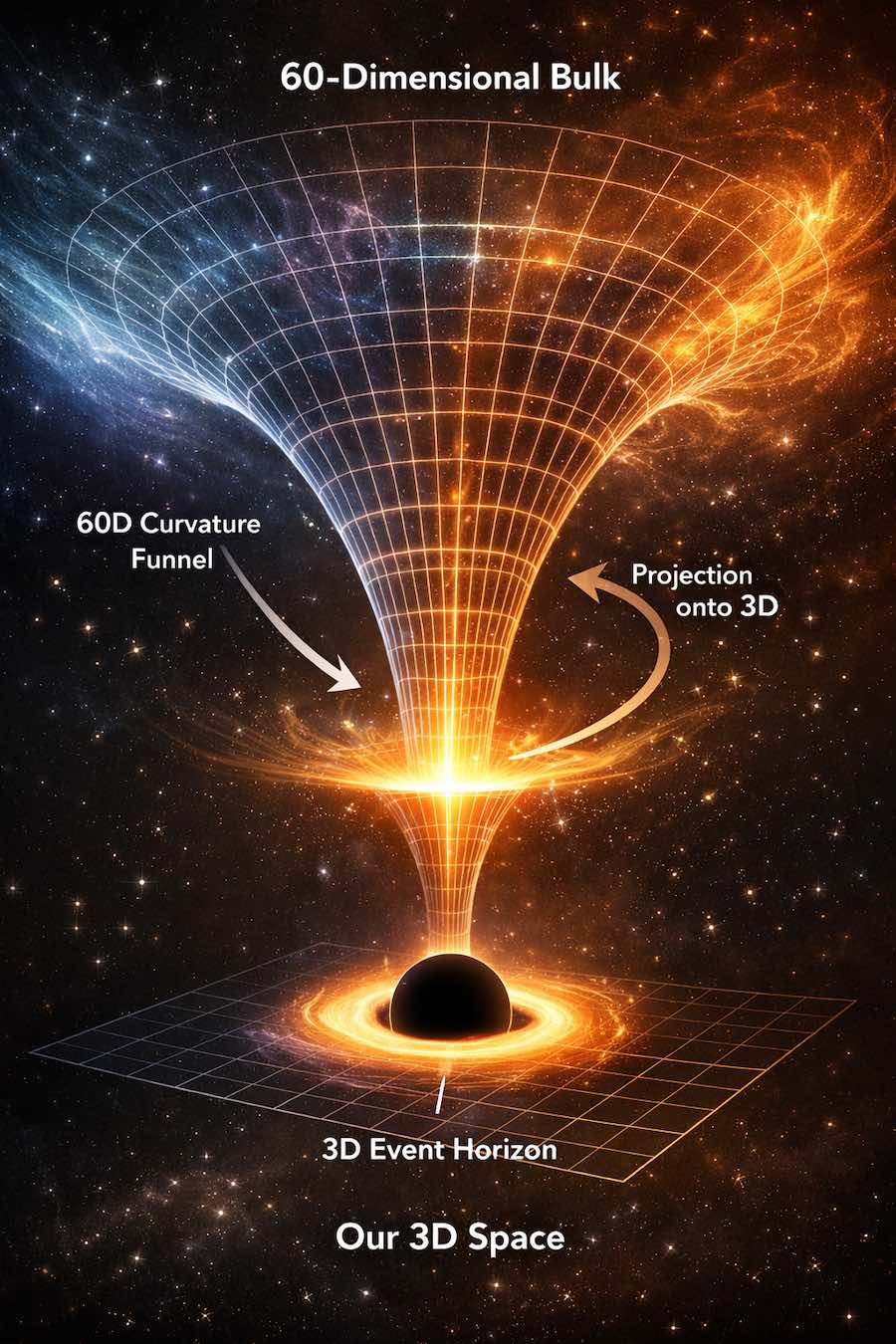
This framework therefore leads to a natural geometric interpretation: the observable universe behaves as a three‑dimensional projection of curvature originating in a much higher‑dimensional gravitational manifold, as depicted in the illustration below.
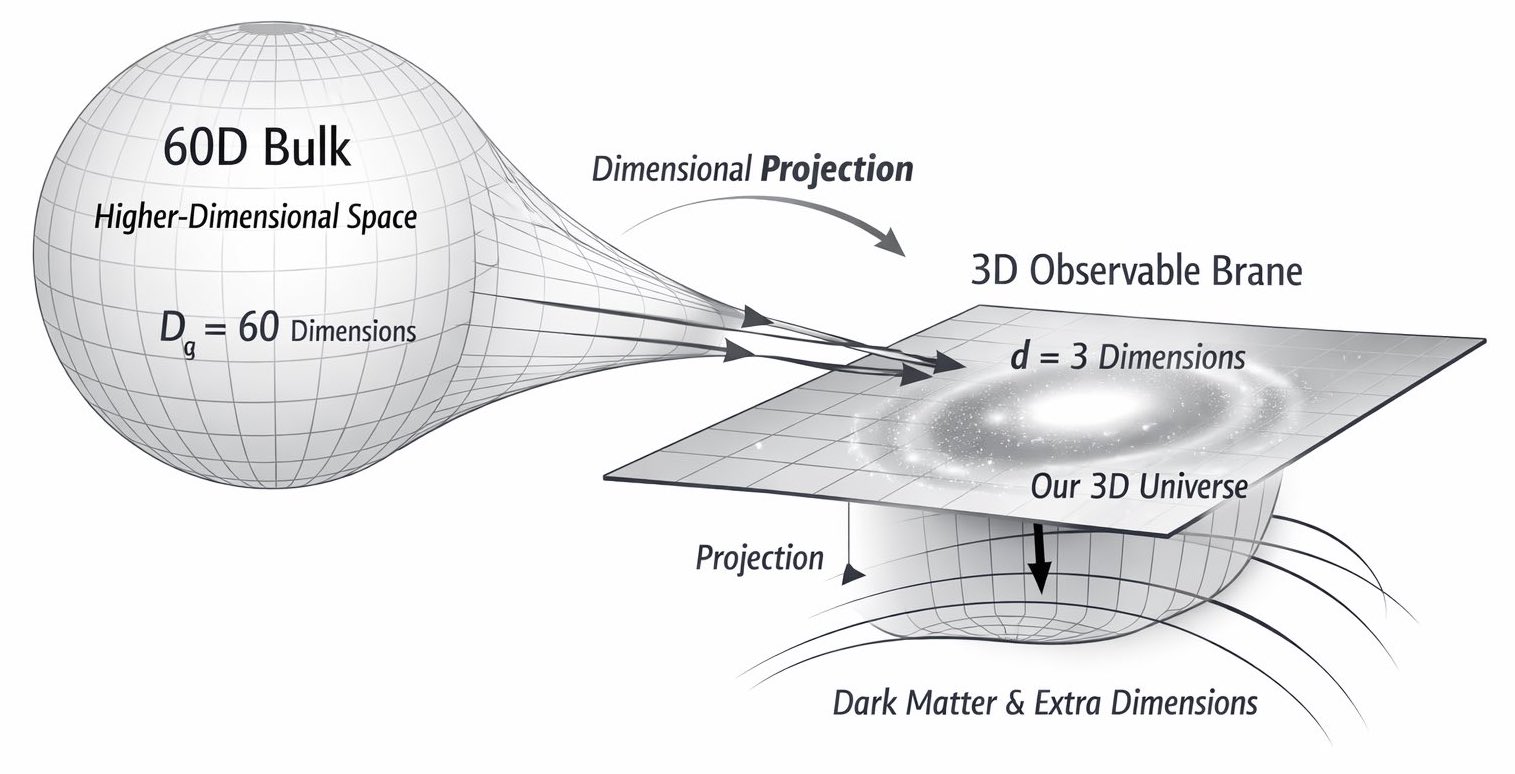
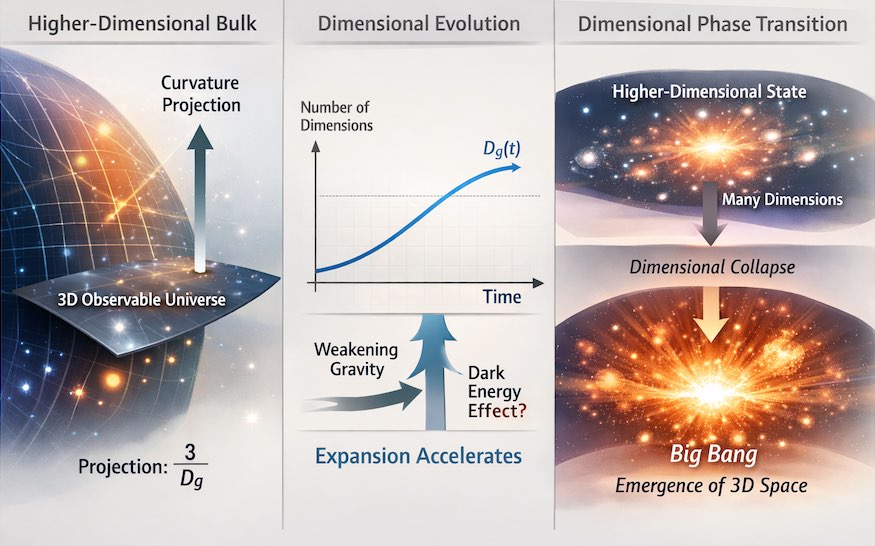
If the observable universe is a lower‑dimensional projection of a higher‑dimensional bulk, then the initial conditions traditionally attributed to the Big Bang may instead reflect geometric features of the higher‑dimensional manifold. The implications of this shift are developed in Section 4.
God geometrizes continually.